
新一代绝影四足机器人发布 具备跑步及上下台阶能力
浙江大学及其孵化的机器人团队4日发布四足机器人“绝影”的迭代版本。新一代“绝影”在原基础上进一步提升算法,已具备跑步及上下台阶的能力。“绝...
浙江大学及其孵化的机器人团队4日发布四足机器人“绝影”的迭代版本。新一代“绝影”在原基础上进一步提升算法,已具备跑步及上下台阶的能力。“绝影”由浙大控制学院、工程师学院教师朱秋国与浙大孵化企业云深处科技合作开发。在团队发布的视频中,记者看到“绝影”在塑胶跑道上富有节奏感地一路“小跑”,身体和四肢有细微的跃动姿态。
朱秋国告诉记者,在跑步时,“绝影”有近三分之一的时间是四足腾空的状态。 “比起行走时始终有足着地的状态,四足腾空意味着空中状态不受控,在着地时会受到更大的冲击力。在空中如何更好地保持平衡,在着地时更快地恢复动态稳定,这些细微之处体现了控制算法的最新进展。”朱秋国说。
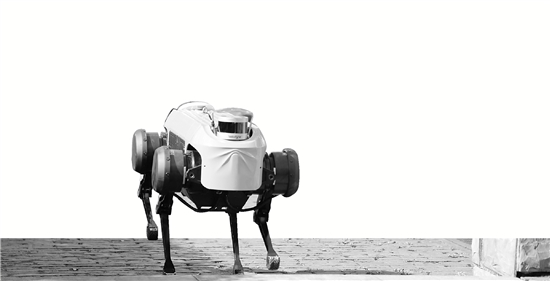
此外,视频还展示了“绝影”在遇到堆放障碍物的台阶后,迅速调整步伐频率与高度,快速适应地形。在这一过程中虽然受到外力干扰、踩空打滑等影响,但“绝影”都迅速恢复了平衡。

据了解,“绝影”身长1米,四足站立时60厘米高,重70千克,载重可达到20公斤,跑步速度大于每小时6公里,续航时间2小时。
“绝影”四足机器人于今年2月首次发布,展现出反应快、姿态稳、定位准的性能,对复杂环境有很强的适应能力,引发高度关注。据介绍,“绝影”四足机器人可搭载多种设备,有望在安防巡检、物流运输、教育科研等方面进行实际应用。

机器人战胜人类时间表:2061年机器人能完成所有人类任务!
话说我们之前介绍的机器人很多了,从能完美复制人类表情的:到会做饭的、会弹跳的、会开门的,简直数不胜数。显而易见,机器人的发展早已不仅限于工业制造领域。通过与人工智能、物联网、大数据等相结合,它早已进入了各个行业,并在朝着越来越智能化和多元化的趋势发展。。...

阿里达摩院机器人“谷神星”上岗 能帮餐厅服务员干80%体力活
中国国际进口博览会大幕开启,中外来宾云集。盛会集中了众多高科技元素。上海国展中心的盒马机器人餐厅中,一款收餐机器人颇为引人注目。收餐机器人在人流里穿梭自如,它会引导顾...
人工智能算个什么?虚拟生命:看清楚我才是未来!
最近,人工智能也是频繁出现在我们视野中,今天小编来开开你们的脑洞,人工智能算个什么?虚拟生命才来的神奇,是不是。虚拟生命:看清楚我才是未来!说起人工智能肯定会有不少人疯狂的...

小狗扫地机器人R55 Cyclone体验 开启懒人生活的大门
被誉为‘新三大件’之一的扫地机器人,近几年在国内受到了越来越多家庭的欢迎。但随着市面上同类产品愈来愈多,也给消费者的选择带来了新难题。为什么外观看上去都...

美国Neato D7扫地机器人评测 堪比自动驾驶越野车
近几年来自动驾驶汽车成为了热门话题,特别是今年1月份的CES展,几乎变成了自动驾驶汽车的展会,众多车企推出极具未来感的自动驾驶产品,引发了一股不小的热潮,这也代表着人工智能的...

人工智能正改变着人类世界 机器人市场现状和前景如何?
人工智能机器人正改变着人类世界。中国机器人在前沿科技和产业发展方面,问题何在?现状和前景如何?...

中美日三国美女机器人对比:中国最逼真,美国超性感,日本呢?
随着时代的发展,人工智能的发展也十分迅速。不难发现,如今的机器人做得已经越来越逼真,所拥有的功能也越来越全面。值得一提的是,现在的机器人不仅拥有各种可以为人类提供帮助的...

波士顿动力公司为Spot机器人找到了新工作:建筑工地巡检员
不满足于掌握跑酷技能的波士顿动力公司,刚刚为其四足行走机器人 Spot 找到了一份新工作。在该公司发布的 YouTube 视频中,我们发现它已经在日本的一处建筑工地上岗。上周,波士...

阿里百度腾讯华为微软亚马逊等人工智能AI创新平台落户上海
9月17日,在世界人工智能大会上,一批全球人工智能创新项目在上海签约落户。包括阿里巴巴、百度等8个AI创新中心(实验室),腾讯、华为等8个AI创新平台,微软、亚马逊等3个AI研究院,...
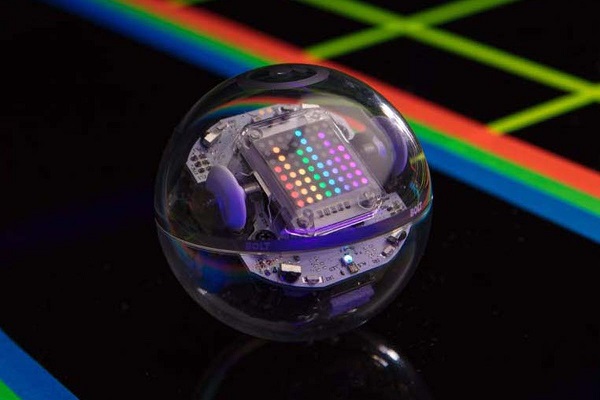
Sphero推出编程教学机器人Bolt 配备红外交互+LED点阵显示屏
Sphero 刚刚推出了名叫 Bolt 的新款教学机器人,与此前推出的 Spark+ 相比,Bolt 最大的特色,就是配备了红外传感器和可编程的 LED 点阵显示屏。在完成任务的时候,Bolt 可以显示一...